Note
Go to the end to download the full example code.
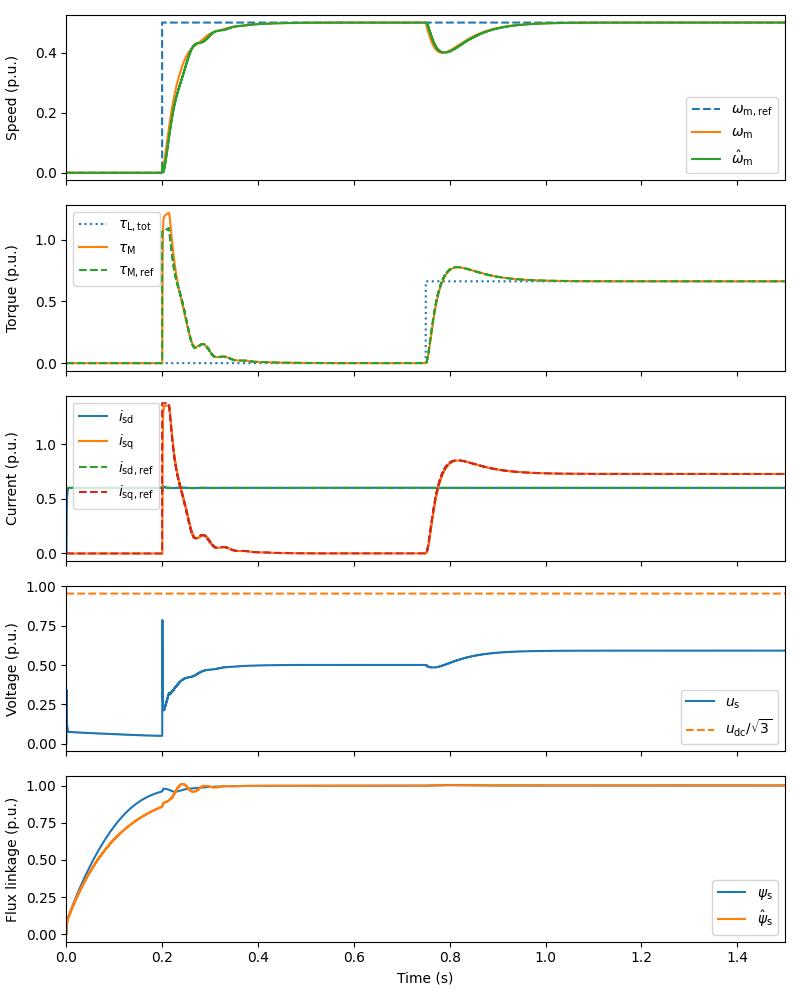
2.2-kW induction motor, saturated#
This example simulates sensorless current-vector control of a 2.2-kW induction motor drive. The magnetic saturation of the machine is also included in the system model, while the control system assumes constant parameters.
from motulator.drive import model
import motulator.drive.control.im as control
from motulator.drive.utils import (
BaseValues, NominalValues, plot, InductionMachinePars,
InductionMachineInvGammaPars)
Compute base values based on the nominal values (just for figures).
nom = NominalValues(U=400, I=5, f=50, P=2.2e3, tau=14.6)
base = BaseValues.from_nominal(nom, n_p=2)
The main-flux saturation in the system model is modeled based on [1]. The default parameters correspond to the measured data of a 2.2-kW machine.
def L_s(psi, L_su=.34, beta=.84, S=7):
"""Stator inductance saturation model."""
return L_su/(1 + (beta*psi)**S)
Configure the system model.
# Γ-equivalent machine model with main-flux saturation included
mdl_par = InductionMachinePars(n_p=2, R_s=3.7, R_r=2.5, L_ell=.023, L_s=L_s)
# Unsaturated machine model, using its inverse-Γ parameters (uncomment to try)
# par = InductionMachineInvGammaPars(
# n_p=2, R_s=3.7, R_R=2.1, L_sgm=.021, L_M=.224)
# mdl_par = InductionMachinePars.from_inv_gamma_model_pars(par)
machine = model.InductionMachine(mdl_par)
mechanics = model.StiffMechanicalSystem(J=.015)
converter = model.VoltageSourceConverter(u_dc=540)
mdl = model.Drive(converter, machine, mechanics)
# mdl.pwm = model.CarrierComparison() # Try to enable the PWM model
# mdl.delay = model.Delay(2) # Try longer computational delay
Configure the control system.
# Machine model parameter estimates
par = InductionMachineInvGammaPars(
n_p=2, R_s=3.7, R_R=2.1, L_sgm=.021, L_M=.224)
# Set nominal values and limits for reference generation
cfg = control.CurrentReferenceCfg(
par, max_i_s=1.5*base.i, nom_u_s=base.u, nom_w_s=base.w)
# Create the control system
ctrl = control.CurrentVectorControl(
par, cfg, J=.015, T_s=250e-6, sensorless=True)
# As an example, you may replace the default 2DOF PI speed controller with the
# regular PI speed controller by uncommenting the following line
# from motulator.common.control import PIController
# ctrl.speed_ctrl = PIController(k_p=1, k_i=1)
Set the speed reference and the external load torque. You may also try to uncomment the field-weakening sequence.
# Simple acceleration and load torque step
ctrl.ref.w_m = lambda t: (t > .2)*(.5*base.w)
mdl.mechanics.tau_L = lambda t: (t > .75)*nom.tau
# No load, field-weakening (uncomment to try)
# ctrl.ref.w_m = lambda t: (t > .2)*(2*base.w)
# mdl.mechanics.tau_L = lambda t: 0
Create the simulation object and simulate it.
sim = model.Simulation(mdl, ctrl)
sim.simulate(t_stop=1.5)
Plot results in per-unit values. By omitting the argument base you can plot the results in SI units.
plot(sim, base)
References
Total running time of the script: (0 minutes 4.122 seconds)