Note
Go to the end to download the full example code.
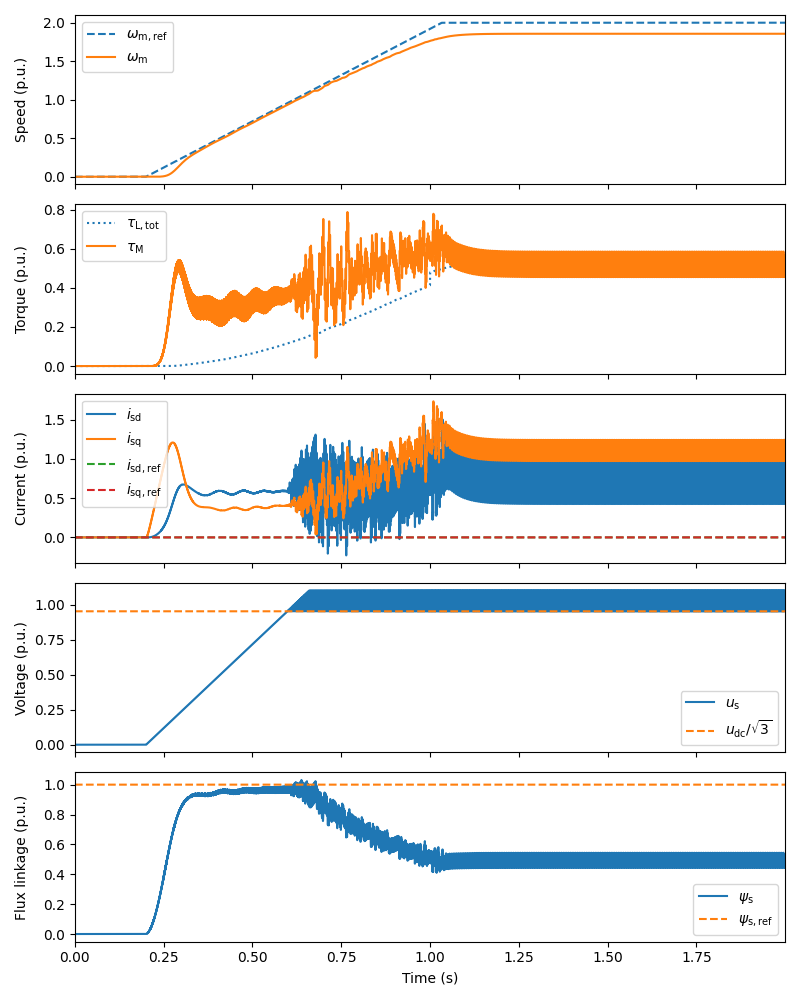
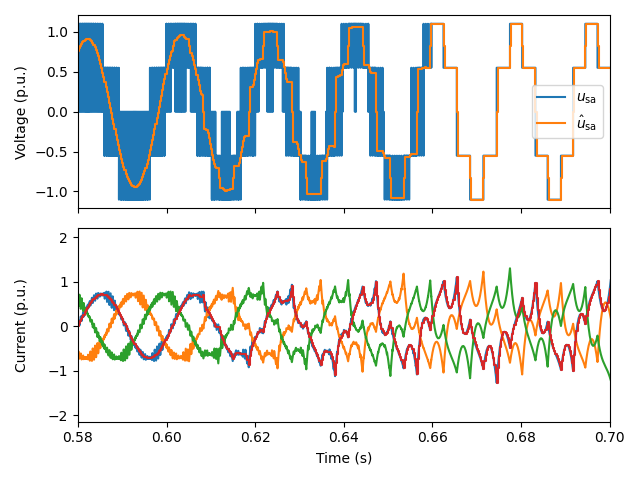
2.2-kW induction motor, 6-step mode#
This example simulates V/Hz control of a 2.2-kW induction motor drive. The six-step overmodulation is enabled, which increases the fundamental voltage as well as the harmonics. Since the PWM is not synchronized with the stator frequency, the harmonic content also depends on the ratio between the stator frequency and the sampling frequency.
import numpy as np
from motulator.drive import model
import motulator.drive.control.im as control
from motulator.drive.utils import (
BaseValues, InductionMachinePars, InductionMachineInvGammaPars,
NominalValues, plot, plot_extra, Sequence)
Compute base values based on the nominal values (just for figures).
nom = NominalValues(U=400, I=5, f=50, P=2.2e3, tau=14.6)
base = BaseValues.from_nominal(nom, n_p=2)
Create the system model.
# Configure the induction machine using its inverse-Γ parameters
mdl_ig_par = InductionMachineInvGammaPars(
n_p=2, R_s=3.7, R_R=2.1, L_sgm=.021, L_M=.224)
mdl_par = InductionMachinePars.from_inv_gamma_model_pars(mdl_ig_par)
machine = model.InductionMachine(mdl_par)
# Mechanics with quadratic load torque coefficient
k = .2*nom.tau/(base.w/base.n_p)**2
mechanics = model.StiffMechanicalSystem(J=.015, B_L=lambda w_M: k*np.abs(w_M))
converter = model.VoltageSourceConverter(u_dc=540)
mdl = model.Drive(converter, machine, mechanics)
mdl.pwm = model.CarrierComparison() # Enable the PWM model
Control system (parametrized as open-loop V/Hz control).
par = InductionMachineInvGammaPars(R_s=0*3.7, R_R=0*2.1, L_sgm=.021, L_M=.224)
ctrl = control.VHzControl(
control.VHzControlCfg(
par, nom_psi_s=base.psi, k_u=0, k_w=0, overmodulation="six_step"))
Set the speed reference and the external load torque.
# Speed reference
times = np.array([0, .1, .3, 1])*2
values = np.array([0, 0, 1, 1])*2*base.w
ctrl.ref.w_m = Sequence(times, values)
# External load torque could be set here, now zero
mdl.mechanics.tau_L = lambda t: (t > 1.)*nom.tau*.1
Create the simulation object and simulate it.
sim = model.Simulation(mdl, ctrl)
sim.simulate(t_stop=2)
Plot results in per-unit values.
# sphinx_gallery_thumbnail_number = 2
plot(sim, base)
plot_extra(sim, base, t_span=(0.58, 0.7))
Total running time of the script: (0 minutes 9.077 seconds)