Note
Go to the end to download the full example code.
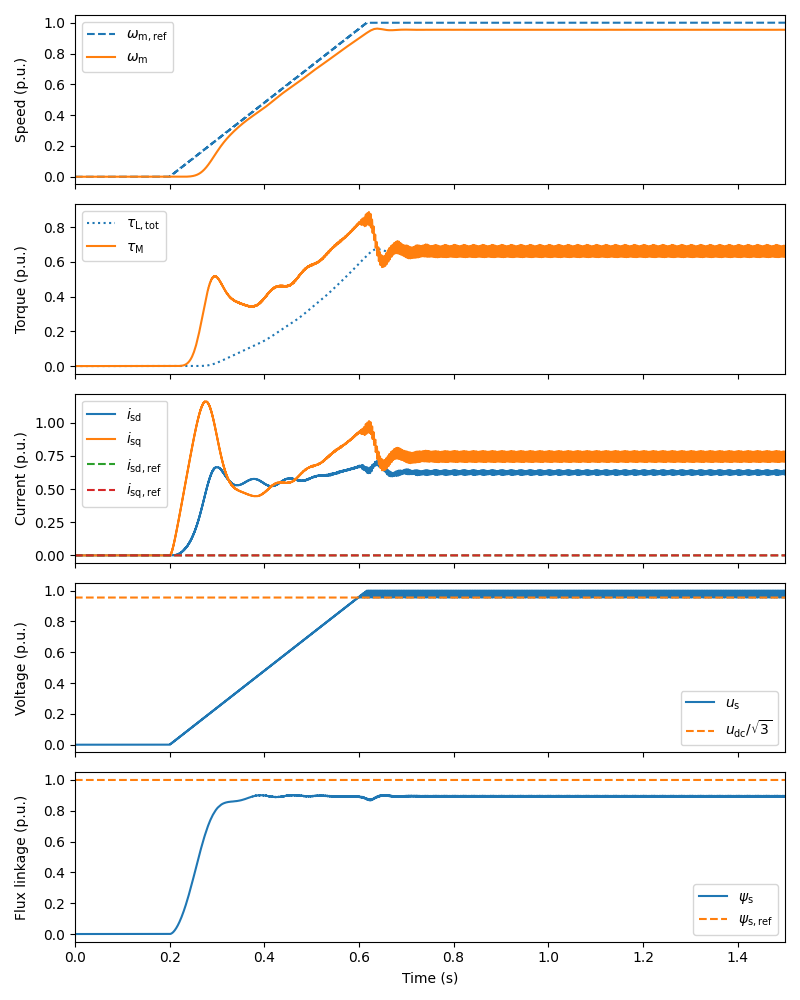
2.2-kW induction motor, LC filter#
This example simulates open-loop V/Hz control of a 2.2-kW induction machine drive equipped with an LC filter.
import numpy as np
import matplotlib.pyplot as plt
from motulator.drive import model
import motulator.drive.control.im as control
from motulator.drive.utils import (
BaseValues, InductionMachinePars, InductionMachineInvGammaPars,
NominalValues, plot)
Compute base values based on the nominal values (just for figures).
nom = NominalValues(U=400, I=5, f=50, P=2.2e3, tau=14.6)
base = BaseValues.from_nominal(nom, n_p=2)
Create the system model. The filter parameters correspond to [1].
mdl_ig_par = InductionMachineInvGammaPars(
n_p=2, R_s=3.7, R_R=2.1, L_sgm=.021, L_M=.224)
mdl_par = InductionMachinePars.from_inv_gamma_model_pars(mdl_ig_par)
machine = model.InductionMachine(mdl_par)
# Quadratic load torque profile (corresponding to pumps and fans)
k = 1.1*nom.tau/(base.w/base.n_p)**2
mechanics = model.StiffMechanicalSystem(J=.015, B_L=lambda w_M: k*np.abs(w_M))
converter = model.VoltageSourceConverter(u_dc=540)
lc_filter = model.LCFilter(L_f=8e-3, C_f=9.9e-6, R_f=.1)
mdl = model.DriveWithLCFilter(converter, machine, mechanics, lc_filter)
mdl.pwm = model.CarrierComparison() # Enable the PWM model
Control system (parametrized as open-loop V/Hz control).
# Inverse-Γ model parameter estimates
par = InductionMachineInvGammaPars(R_s=0*3.7, R_R=0*2.1, L_sgm=.021, L_M=.224)
ctrl = control.VHzControl(
control.VHzControlCfg(par, nom_psi_s=base.psi, k_u=0, k_w=0))
Set the speed reference. The external load torque is zero (by default).
ctrl.ref.w_m = lambda t: (t > .2)*base.w
Create the simulation object and simulate it.
sim = model.Simulation(mdl, ctrl)
sim.simulate(t_stop=1.5)
Plot results in per-unit values.
# sphinx_gallery_thumbnail_number = 2
plot(sim, base)
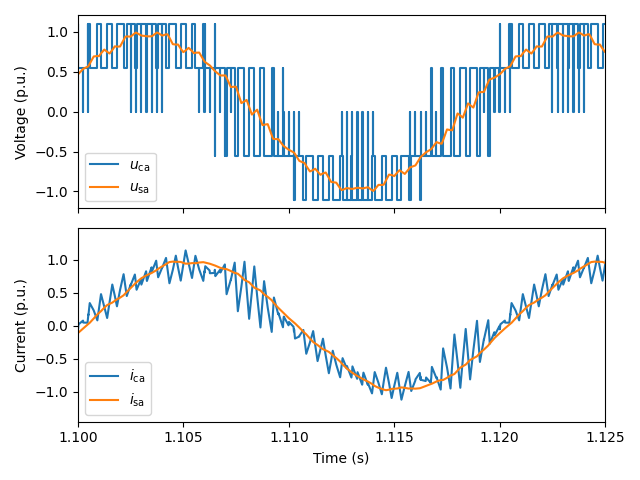
Plot additional waveforms.
t_span = (1.1, 1.125) # Time span for the zoomed-in plot
mdl = sim.mdl # Continuous-time data
# Plot the converter and stator voltages (phase a)
fig1, (ax1, ax2) = plt.subplots(2, 1)
ax1.plot(
mdl.converter.data.t,
mdl.converter.data.u_cs.real/base.u,
label=r"$u_\mathrm{ca}$")
ax1.plot(
mdl.machine.data.t,
mdl.machine.data.u_ss.real/base.u,
label=r"$u_\mathrm{sa}$")
ax1.set_xlim(t_span)
ax1.legend()
ax1.set_xticklabels([])
ax1.set_ylabel("Voltage (p.u.)")
# Plot the converter and stator currents (phase a)
ax2.plot(
mdl.converter.data.t,
mdl.converter.data.i_cs.real/base.i,
label=r"$i_\mathrm{ca}$")
ax2.plot(
mdl.machine.data.t,
mdl.machine.data.i_ss.real/base.i,
label=r"$i_\mathrm{sa}$")
ax2.set_xlim(t_span)
ax2.legend()
ax2.set_ylabel("Current (p.u.)")
ax2.set_xlabel("Time (s)")
plt.tight_layout()
plt.show()
References
Total running time of the script: (0 minutes 9.934 seconds)