Note
Go to the end to download the full example code.
6.7-kW SyRM, saturated, disturbance estimation#
This example simulates sensorless stator-flux-vector control of a saturated 6.7-kW synchronous reluctance motor drive. The saturation is not taken into account in the control method (only in the system model). Even if the machine has no magnets, the PM-flux disturbance estimation is enabled [1]. In this case, this PM-flux estimate lumps the effects of inductance errors. Naturally, the PM-flux estimation can be used in PM machine drives as well.
import numpy as np
import matplotlib.pyplot as plt
from motulator.drive import model
import motulator.drive.control.sm as control
from motulator.drive.utils import (
BaseValues, NominalValues, plot, Sequence, SynchronousMachinePars)
Compute base values based on the nominal values (just for figures).
nom = NominalValues(U=370, I=15.5, f=105.8, P=6.7e3, tau=20.1)
base = BaseValues.from_nominal(nom, n_p=2)
Create a saturation model, see the example 6.7-kW SyRM, saturated for further details.
def i_s(psi_s):
"""Magnetic model for a 6.7-kW synchronous reluctance motor."""
# Parameters
a_d0, a_dd, S = 17.4, 373., 5 # d-axis self-saturation
a_q0, a_qq, T = 52.1, 658., 1 # q-axis self-saturation
a_dq, U, V = 1120., 1, 0 # Cross-saturation
# Inverse inductance functions
G_d = a_d0 + a_dd*np.abs(psi_s.real)**S + (
a_dq/(V + 2)*np.abs(psi_s.real)**U*np.abs(psi_s.imag)**(V + 2))
G_q = a_q0 + a_qq*np.abs(psi_s.imag)**T + (
a_dq/(U + 2)*np.abs(psi_s.real)**(U + 2)*np.abs(psi_s.imag)**V)
# Stator current
return G_d*psi_s.real + 1j*G_q*psi_s.imag
Configure the system model.
mdl_par = SynchronousMachinePars(n_p=2, R_s=.54)
machine = model.SynchronousMachine(mdl_par, i_s=i_s, psi_s0=0)
# Magnetically linear SyRM model for comparison
# mdl_par = SynchronousMachinePars(
# n_p=2, R_s=.54, L_d=37e-3, L_q=6.2e-3, psi_f=0)
# machine = model.SynchronousMachine(mdl_par)
mechanics = model.StiffMechanicalSystem(J=.015)
converter = model.VoltageSourceConverter(u_dc=540)
mdl = model.Drive(converter, machine, mechanics)
Configure the control system. The saturation is not taken into account. Furthermore, the inductance estimates L_d and L_q are intentionally set to lower values in order to demonstrate the PM-flux disturbance estimation.
par = SynchronousMachinePars(
n_p=2, R_s=.54, L_d=.7*37e-3, L_q=.8*6.2e-3, psi_f=0)
# Disable MTPA since the control system does not consider the saturation
cfg = control.FluxTorqueReferenceCfg(
par, max_i_s=2*base.i, k_u=.9, min_psi_s=base.psi, max_psi_s=base.psi)
ctrl = control.FluxVectorControl(par, cfg, J=.015, sensorless=True)
# Since the saturation is not considered in the control system, the speed
# estimation bandwidth is set to a lower value. Furthermore, the PM-flux
# disturbance estimation is enabled at speeds above 2*pi*20 rad/s (electrical).
ctrl.observer = control.Observer(
control.ObserverCfg(
par,
alpha_o=2*np.pi*40,
k_f=lambda w_m: max(.05*(np.abs(w_m) - 2*np.pi*20), 0),
sensorless=True))
Set the speed reference and the external load torque.
# Speed reference (electrical rad/s)
times = np.array([0, .125, .25, .375, .5, .625, .75, .875, 1])*4
values = np.array([0, 0, 1, 1, 0, -1, -1, 0, 0])*base.w
ctrl.ref.w_m = Sequence(times, values)
# External load torque
times = np.array([0, .125, .125, .875, .875, 1])*4
values = np.array([0, 0, 1, 1, 0, 0])*nom.tau
mdl.mechanics.tau_L = Sequence(times, values)
Create the simulation object and simulate it.
sim = model.Simulation(mdl, ctrl)
sim.simulate(t_stop=4)
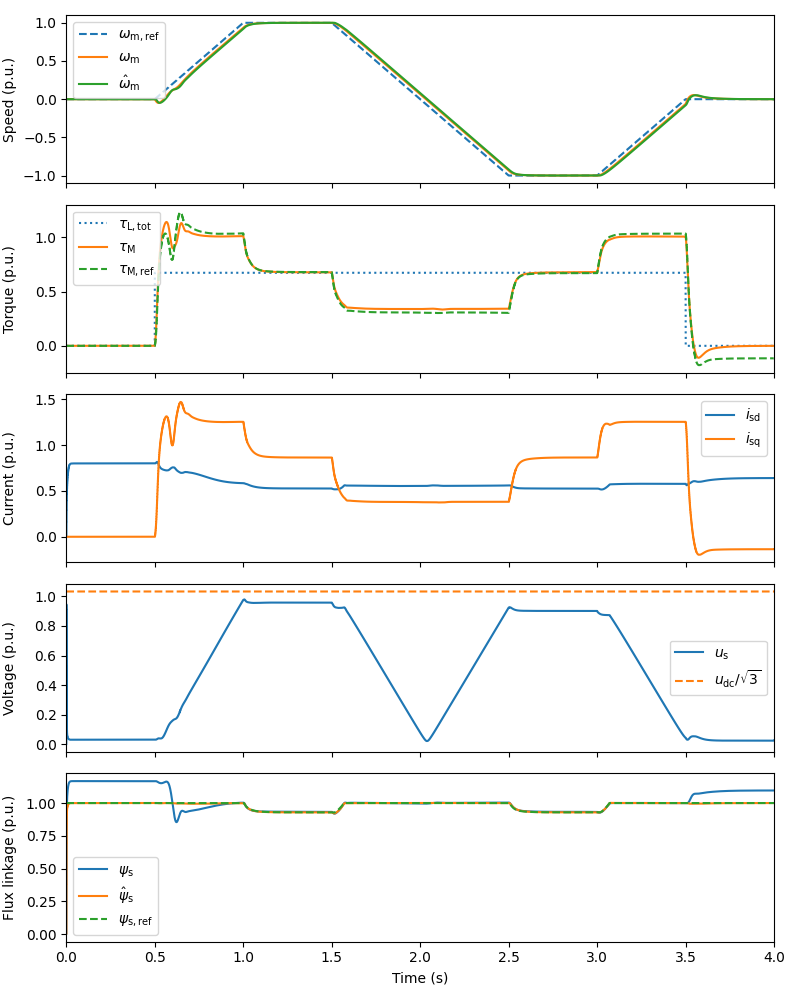
Plot results in per-unit values. The transient after t = 0.5 s is due to the errors in the inductances. The PM-flux estimate compensates for these errors.
plot(sim, base)
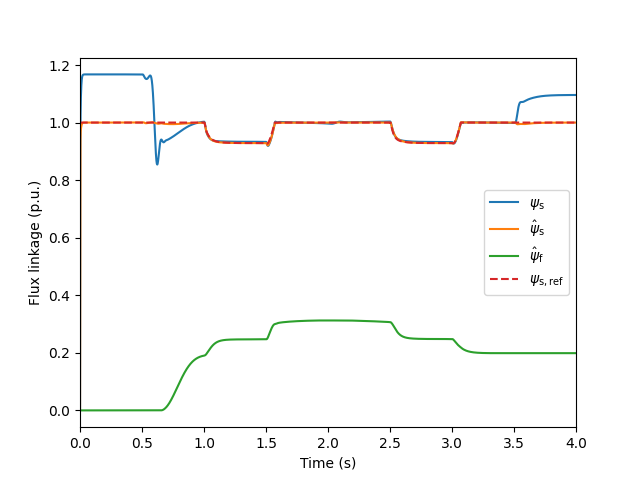
Plot the flux linkages and the PM-flux disturbance estimate. Due to the inductance errors and the magnetic saturation, it is nonzero even if the machine has no magnets.
mdl = sim.mdl # Continuous-time data
ctrl = sim.ctrl.data # Discrete-time data
ctrl.t = ctrl.ref.t # Discrete time
plt.figure()
plt.plot(
mdl.machine.data.t,
np.abs(mdl.machine.data.psi_s)/base.psi,
label=r"$\psi_\mathrm{s}$")
plt.plot(
ctrl.t, np.abs(ctrl.fbk.psi_s)/base.psi, label=r"$\hat{\psi}_\mathrm{s}$")
plt.plot(ctrl.t, ctrl.fbk.psi_f/base.psi, label=r"$\hat{\psi}_\mathrm{f}$")
plt.plot(ctrl.t, ctrl.ref.psi_s/base.psi, "--", label=r"$\psi_\mathrm{s,ref}$")
plt.xlim(0, 4)
plt.xlabel("Time (s)")
plt.ylabel("Flux linkage (p.u.)")
plt.legend()
plt.show()
References
Total running time of the script: (0 minutes 15.273 seconds)