Note
Go to the end to download the full example code.
5.6-kW PM-SyRM, saturated#
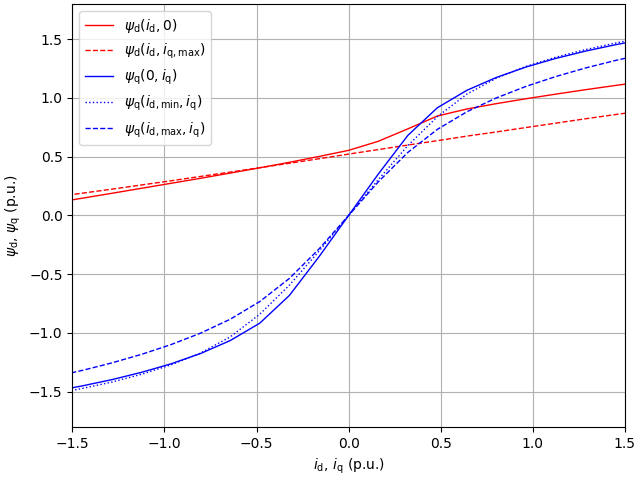
This example simulates sensorless stator-flux-vector control of a 5.6-kW PM-SyRM (Baldor ECS101M0H7EF4) drive. The machine model is parametrized using the flux map data, measured using the constant-speed test. The control system is parametrized using the algebraic saturation model from [1], fitted to the measured data. This saturation model can capture the de-saturation phenomenon of thin iron ribs, see [2] for details. For comparison, the measured data is plotted together with the model predictions.
from pathlib import Path
import numpy as np
from scipy.io import loadmat
import motulator.drive.control.sm as control
from motulator.drive import model, utils
Compute base values based on the nominal values (just for figures).
nom = utils.NominalValues(U=460, I=8.8, f=60, P=5.6e3, tau=29.7)
base = utils.BaseValues.from_nominal(nom, n_p=2)
Plot the saturation model (surfaces) and the measured flux map data (points). This data is used to parametrize the machine model.
# Load the measured data from the MATLAB file
p = Path(__file__).resolve().parent if "__file__" in globals() else Path.cwd()
meas_data = loadmat(p / "ABB_400rpm_map.mat")
# Create the flux map from the measured data
meas_flux_map = utils.MagneticModel(
i_s_dq=meas_data["id_map"] + 1j * meas_data["iq_map"],
psi_s_dq=meas_data["psid_map"] + 1j * meas_data["psiq_map"],
type="flux_map",
)
# Plot the measured data
# sphinx_gallery_thumbnail_number = 4
utils.plot_flux_vs_current(meas_flux_map, base, x_lims=(-1.5, 1.5))
Create a saturation model, which will be used in the control system.
i_s_dq_fcn = utils.SaturationModelPMSyRM(
a_d0=3.96,
a_dd=28.5,
S=4,
a_q0=1.1 * 5.89, # Unsaturated q-axis inductance is underestimated for robustness
a_qq=2.67,
T=6,
a_dq=41.5,
U=1,
V=1,
a_b=81.75,
a_bp=1,
k_q=0.1,
psi_n=0.804,
W=2,
)
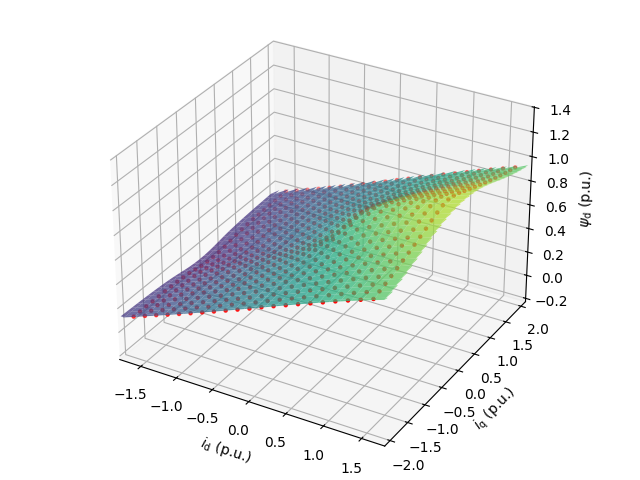
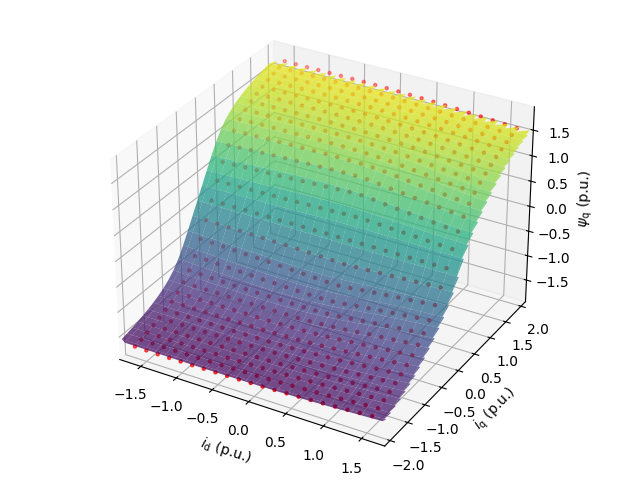
Compare the saturation model with the measured data.
# Generate the flux map using the saturation model
est_curr_map = i_s_dq_fcn.as_magnetic_model(
d_range=np.linspace(-0.1, base.psi, 256),
q_range=np.linspace(-1.4 * base.psi, 1.4 * base.psi, 256),
)
est_flux_map = est_curr_map.invert()
# Plot the saturation model (surface) and the measured data (points)
utils.plot_map(
est_flux_map,
"d",
base,
x_lims=(-2, 2),
y_lims=(-2, 2),
z_lims=(0, 1),
x_ticks=[-2, -1, 0, 1, 2],
y_ticks=[-2, -1, 0, 1, 2],
raw_data=meas_flux_map,
)
utils.plot_map(
est_flux_map,
"q",
base,
x_lims=(-2, 2),
y_lims=(-2, 2),
z_lims=(-1.5, 1.5),
x_ticks=[-2, -1, 0, 1, 2],
y_ticks=[-2, -1, 0, 1, 2],
raw_data=meas_flux_map,
)
Configure the system model.
meas_curr_map = meas_flux_map.invert()
par = model.SaturatedSynchronousMachinePars(n_p=2, R_s=0.63, i_s_dq_fcn=meas_curr_map)
machine = model.SynchronousMachine(par)
mechanics = model.MechanicalSystem(J=0.05)
converter = model.VoltageSourceConverter(u_dc=540)
mdl = model.Drive(machine, mechanics, converter)
Configure the control system.
est_par = control.SaturatedSynchronousMachinePars(
n_p=2, R_s=0.63, i_s_dq_fcn=est_curr_map, psi_s_dq_fcn=est_flux_map
)
cfg = control.FluxVectorControllerCfg(i_s_max=2 * base.i, alpha_o=2 * np.pi * 50)
vector_ctrl = control.FluxVectorController(est_par, cfg, sensorless=True)
speed_ctrl = control.SpeedController(J=0.05, alpha_s=2 * np.pi * 4)
ctrl = control.VectorControlSystem(vector_ctrl, speed_ctrl)
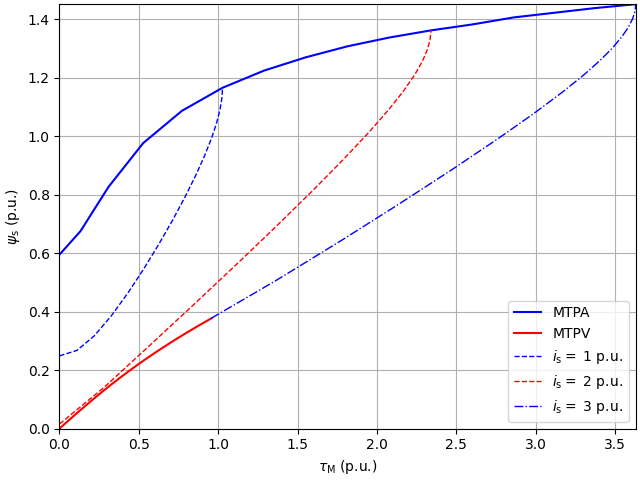
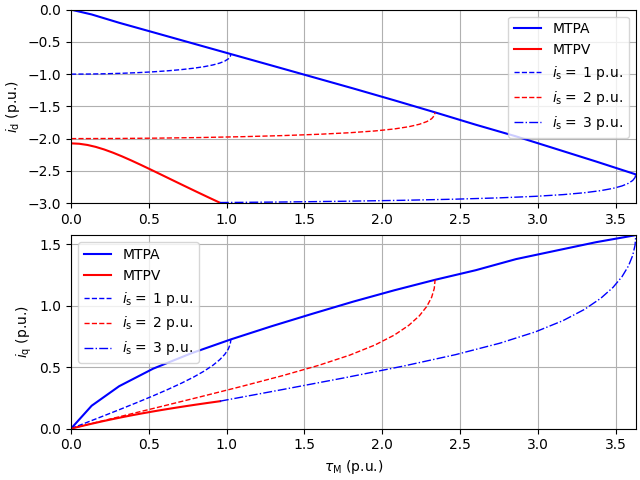
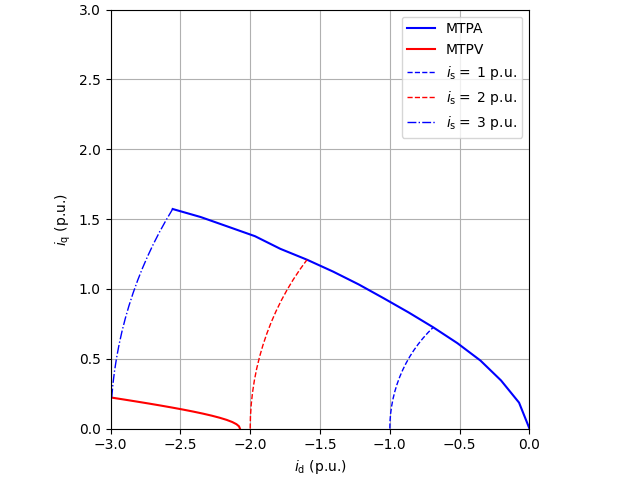
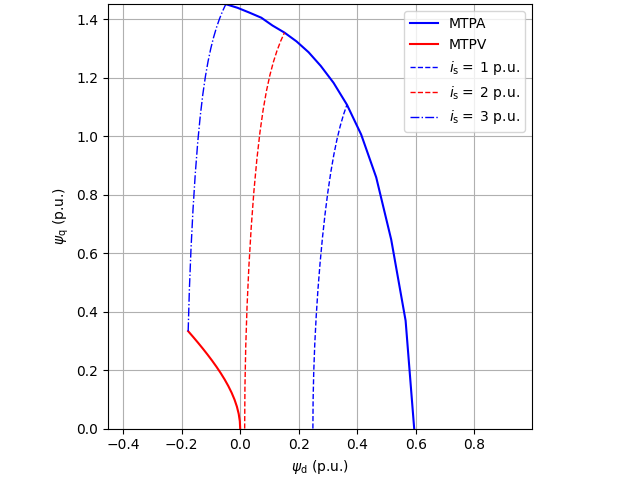
Visualize the control loci.
Set the speed reference and the external load torque.
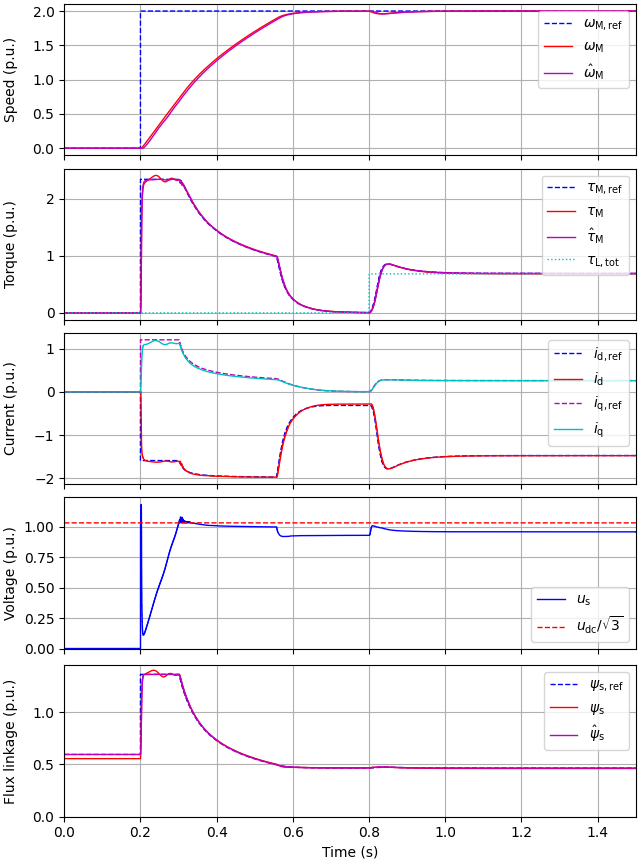
Create the simulation object, simulate, and plot the results in per-unit values.
sim = model.Simulation(mdl, ctrl)
res = sim.simulate(t_stop=1.4)
utils.plot(res, base)
References
Total running time of the script: (0 minutes 25.091 seconds)