Note
Go to the end to download the full example code.
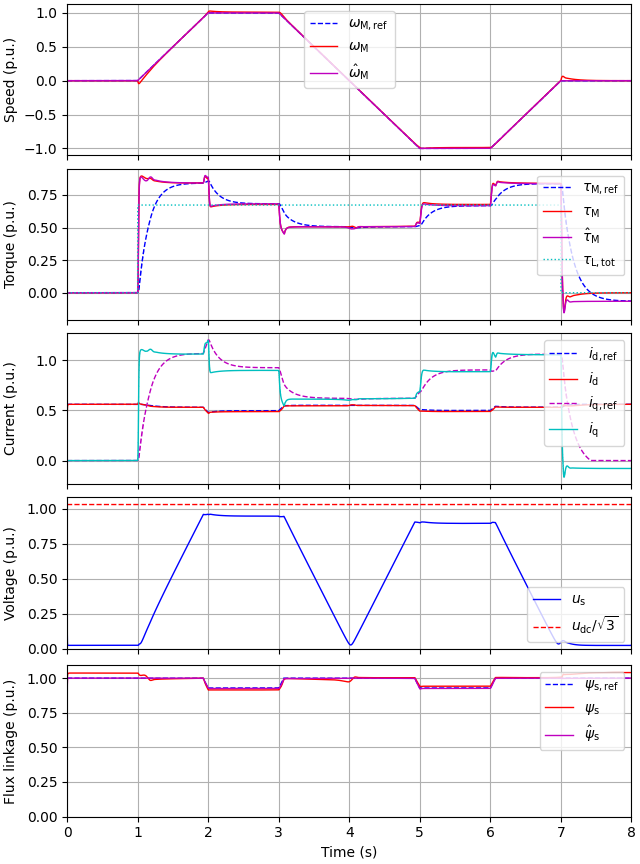
6.7-kW SyRM, saturated#
This example simulates observer-based V/Hz control of a saturated 6.7-kW synchronous reluctance motor drive. The control method uses constant inductances.
import numpy as np
import motulator.drive.control.sm as control
from motulator.drive import model, utils
Compute base values based on the nominal values (just for figures).
nom = utils.NominalValues(U=370, I=15.5, f=105.8, P=6.7e3, tau=20.1)
base = utils.BaseValues.from_nominal(nom, n_p=2)
Configure the system model. The saturation model is based on [1].
i_s_dq_fcn = utils.SaturationModelSyRM(
a_d0=17.4, a_dd=373, S=5, a_q0=52.1, a_qq=658, T=1, a_dq=1120, U=1, V=0
)
par = model.SaturatedSynchronousMachinePars(
n_p=2, R_s=0.54, i_s_dq_fcn=i_s_dq_fcn, kind="rel"
)
machine = model.SynchronousMachine(par)
mechanics = model.MechanicalSystem(J=0.015)
converter = model.VoltageSourceConverter(u_dc=540)
mdl = model.Drive(machine, mechanics, converter)
Configure the control system.
est_par = control.SynchronousMachinePars(
n_p=2, R_s=0.54, L_d=37e-3, L_q=6.2e-3, psi_f=0, kind="rel"
)
cfg = control.ObserverBasedVHzControllerCfg(
i_s_max=2 * base.i, psi_s_min=base.psi, psi_s_max=base.psi
)
vhz_ctrl = control.ObserverBasedVHzController(est_par, cfg)
ctrl = control.VHzControlSystem(vhz_ctrl)
Set the speed reference and the external load torque.
t_stop = 8
times = np.array([0, 0.125, 0.25, 0.375, 0.5, 0.625, 0.75, 0.875, 1]) * t_stop
values = np.array([0, 0, 1, 1, 0, -1, -1, 0, 0]) * base.w_M
ctrl.set_speed_ref(utils.SequenceGenerator(times, values))
times = np.array([0, 0.125, 0.125, 0.875, 0.875, 1]) * t_stop
values = np.array([0, 0, 1, 1, 0, 0]) * nom.tau
mdl.mechanics.set_external_load_torque(utils.SequenceGenerator(times, values))
Create the simulation object, simulate, and plot the results in per-unit values.
sim = model.Simulation(mdl, ctrl)
res = sim.simulate(t_stop)
utils.plot(res, base)
References
Total running time of the script: (0 minutes 22.838 seconds)