Note
Go to the end to download the full example code.
5.1-kW saturated PM-SyRM, CVC#
This example simulates sensorless current-vector control (CVC) of a saturated 5.1-kW permanent-magnet synchronous reluctance machine (PM-SyRM). The flux maps of this example machine, known as THOR, are from the SyR-e project:
The SyR-e project has been licensed under the Apache License, Version 2.0. We acknowledge the developers of the SyR-e project. The flux maps from other sources can be used in a similar manner.
The control system takes the saturation into account. This example also demonstrates the mechanical-model-based speed observer [1]. The lag of the speed estimate in accelerations is avoided, allowing to increase the speed-control bandwidth.
Compute base values based on the nominal values (just for figures).
nom = utils.NominalValues(U=220, I=15.6, f=85, P=5.07e3, tau=19)
base = utils.BaseValues.from_nominal(nom, n_p=2)
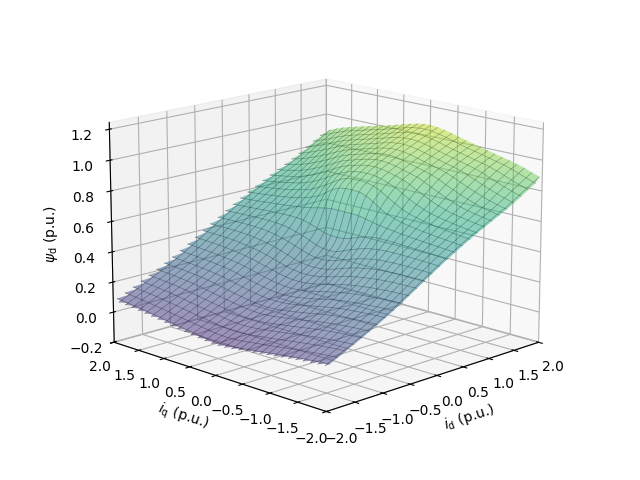
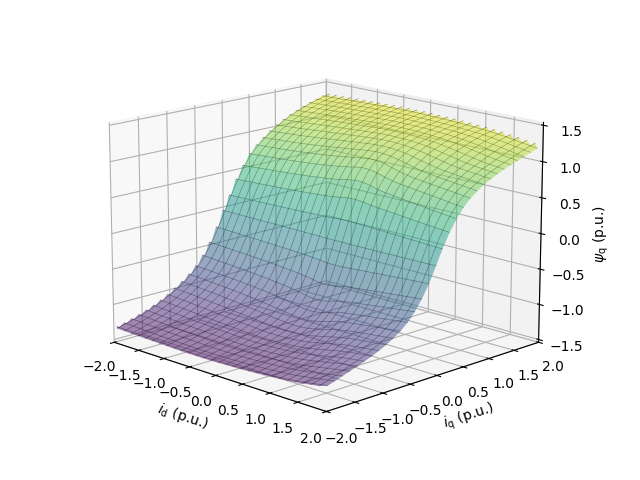
Load and plot the flux maps.
# Get the path of the MATLAB file and load the FEM data
p = Path(__file__).resolve().parent if "__file__" in globals() else Path.cwd()
fem_flux_map = utils.import_syre_data(p / "thor.mat")
utils.plot_map(fem_flux_map, "d", base, lims={"x": (-2, 2), "y": (-2, 2)})
utils.plot_map(fem_flux_map, "q", base, lims={"x": (-2, 2), "y": (-2, 2)})
Configure the system model.
# Create the machine model
fem_curr_map = fem_flux_map.invert()
par = model.SaturatedSynchronousMachinePars(n_p=2, R_s=0.2, i_s_dq_fcn=fem_curr_map)
machine = model.SynchronousMachine(par)
k = 0.1 * nom.tau / base.w_M**2 # Quadratic load torque profile
mechanics = model.MechanicalSystem(J=2 * 0.0042, B_L=lambda w_M: k * abs(w_M))
converter = model.VoltageSourceConverter(u_dc=310)
mdl = model.Drive(machine, mechanics, converter)
Configure the control system. Since the inertia estimate J is provided in CurrentVectorControllerCfg, the mechanical-model-based speed observer is used.
est_par = control.SaturatedSynchronousMachinePars(
n_p=2, R_s=0.2, psi_s_dq_fcn=fem_flux_map, i_s_dq_fcn=fem_curr_map
)
cfg = control.CurrentVectorControllerCfg(i_s_max=2 * base.i, J=2 * 0.0042)
vector_ctrl = control.CurrentVectorController(est_par, cfg, sensorless=True)
speed_ctrl = control.SpeedController(J=2 * 0.0042, alpha_s=2 * pi * 4)
ctrl = control.VectorControlSystem(vector_ctrl, speed_ctrl)
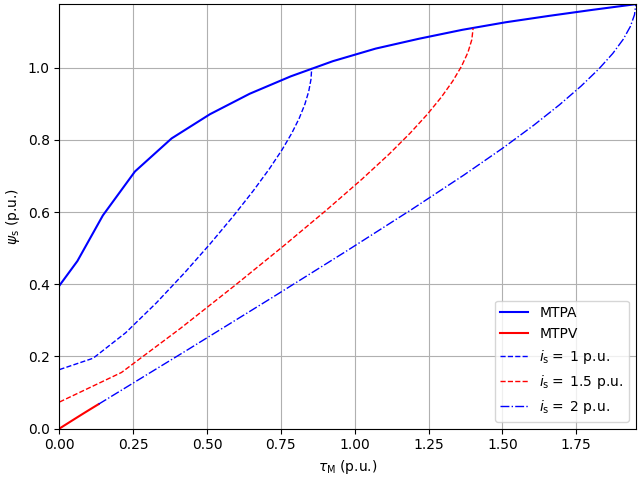
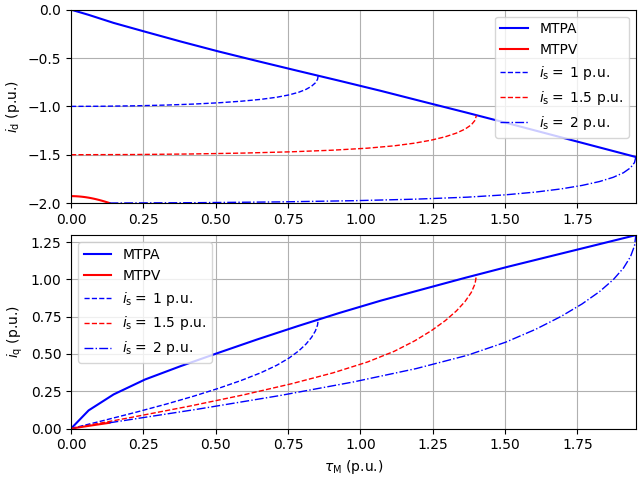
Plot control characteristics.
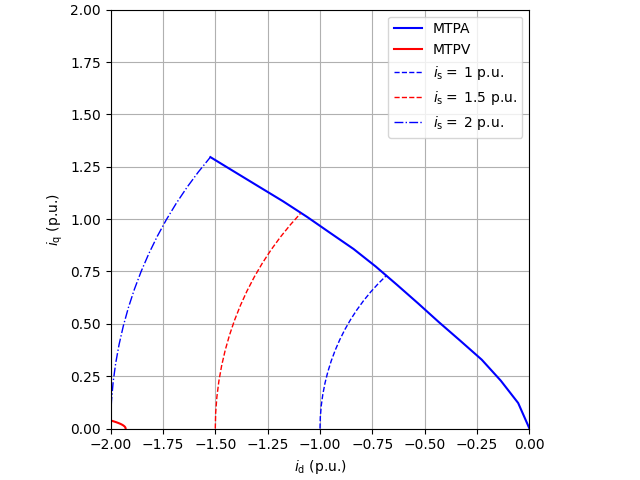
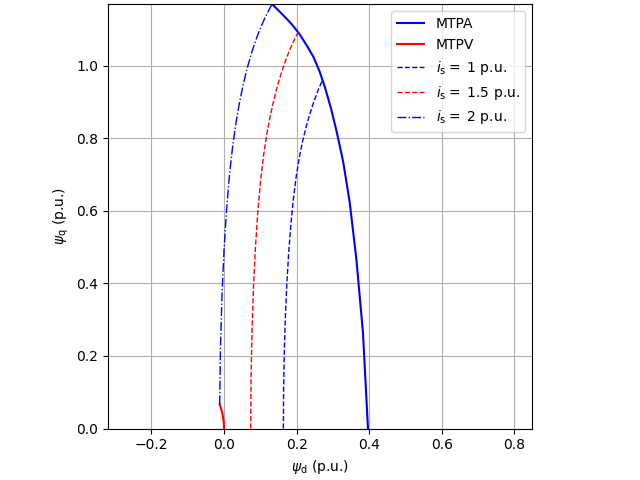
Set the speed reference and the external load torque.
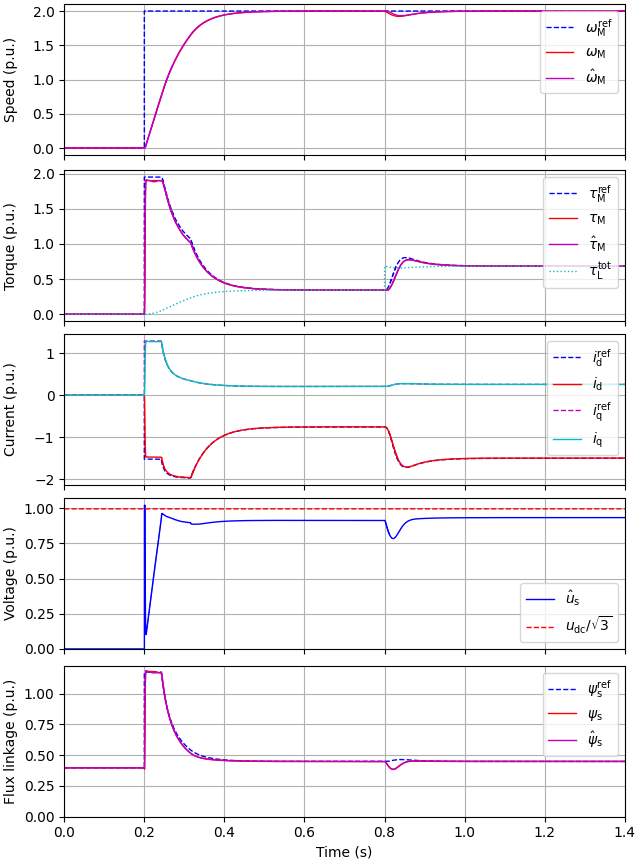
Create the simulation object, simulate, and plot the results in per-unit values.
sim = model.Simulation(mdl, ctrl)
res = sim.simulate(t_stop=1.4)
utils.plot(res, base)
References
Total running time of the script: (0 minutes 38.936 seconds)