Note
Go to the end to download the full example code.
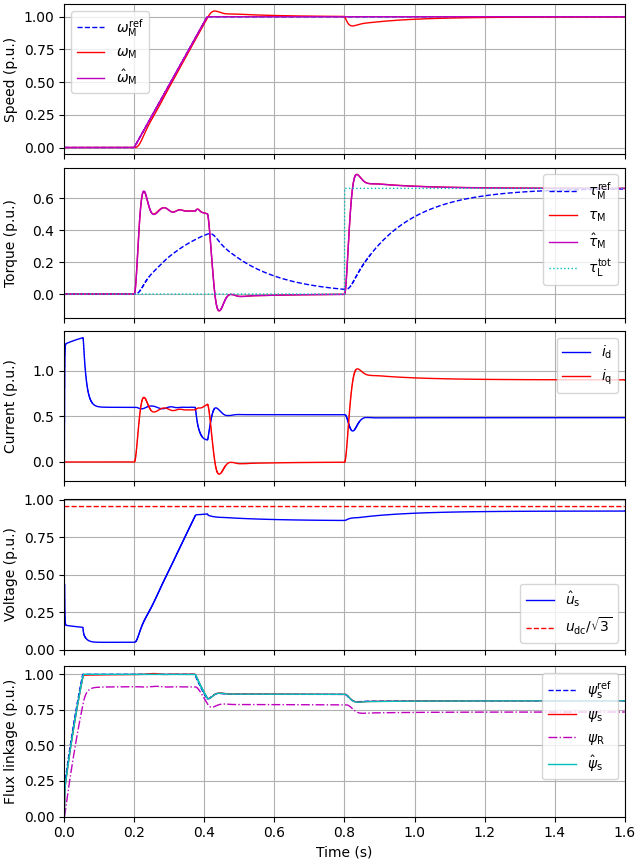
2.2-kW IM, O-V/Hz control#
This example simulates observer-based V/Hz (O-V/Hz) control of a 2.2-kW induction machine (IM).
from math import pi
import motulator.drive.control.im as control
from motulator.drive import model, utils
Compute base values based on the nominal values.
nom = utils.NominalValues(U=400, I=5, f=50, P=2.2e3, tau=14.6)
base = utils.BaseValues.from_nominal(nom, n_p=2)
Configure the system model.
par = model.InductionMachineInvGammaPars(
n_p=2, R_s=3.7, R_R=2.1, L_sgm=0.021, L_M=0.224
)
machine = model.InductionMachine(par)
mechanics = model.MechanicalSystem(J=0.015)
converter = model.VoltageSourceConverter(u_dc=540)
mdl = model.Drive(machine, mechanics, converter)
Configure the control system.
est_par = control.InductionMachineInvGammaPars(
n_p=2, R_s=3.7, R_R=2.1, L_sgm=0.021, L_M=0.224
)
cfg = control.ObserverBasedVHzControllerCfg(psi_s_nom=base.psi, i_s_max=1.5 * base.i)
vhz_ctrl = control.ObserverBasedVHzController(est_par, cfg)
ctrl = control.VHzControlSystem(vhz_ctrl, slew_rate=2 * pi * 120)
Set the speed reference and the external load torque.
Create the simulation object, simulate, and plot the results in per-unit values.
sim = model.Simulation(mdl, ctrl)
res = sim.simulate(t_stop=1.6)
utils.plot(res, base)
Total running time of the script: (0 minutes 3.006 seconds)